Wrangling data organizes the data in a form that is suitable for statistical analysis. After wrangling, the data is usually in a rectangular form, each observation in a separate row, each variable in a separate column.
While the data might have the right shape, the variables might not have the right content. Feature and target processing falls under the umbrella of preprocessing data, but now the focus is on transforming the data into a form suitable for analytic models–processing the data before it is consumed by a model.
To make the difference between processing for data quality and feature processing explicit, consider the data in Table 5.1.
Table 5.1: City names before and after data processing for quality.
Before Processing
After Processing
New York
New York
NY
New York
new York
New York
LA
Los Angeles
LAX
Los Angeles
Los Ang.
Los Angeles
Chicago
Chicago
Chicago, Ill.
Chicago
Data quality ensures that city names are consistent in the data set. Feature processing transforms the corrected city names into a numerical representation for analytic processing.
Preprocessing data for modeling applies to the target variable and the input variables. For example, one-hot encoding of categorical variables is used to represent categorical input variables as multiple dummy variables on the right hand side of the model. It is also used to encode categorical target variables for classification models.
5.1 Standardization
Centering and Scaling
Standardizing a variable \(X\) comprises two steps, centering and scaling. Scaling does what it says, it replaces \(x_i\) with \(c\times x_i\) where \(c\) is the scaling factor. Centering means shifting the variable so that it is centered at some specific value. The common parameters of standardization are centering at the mean \(\overline{y}\) and scaling with the standard deviation \(s_x\): \[
z = \frac{x-\overline{x}}{s_x}
\] The transformed variable has a sample mean of 0 and a sample standard deviation of 1: \[
\overline{z} = 0 \qquad s_z = 1
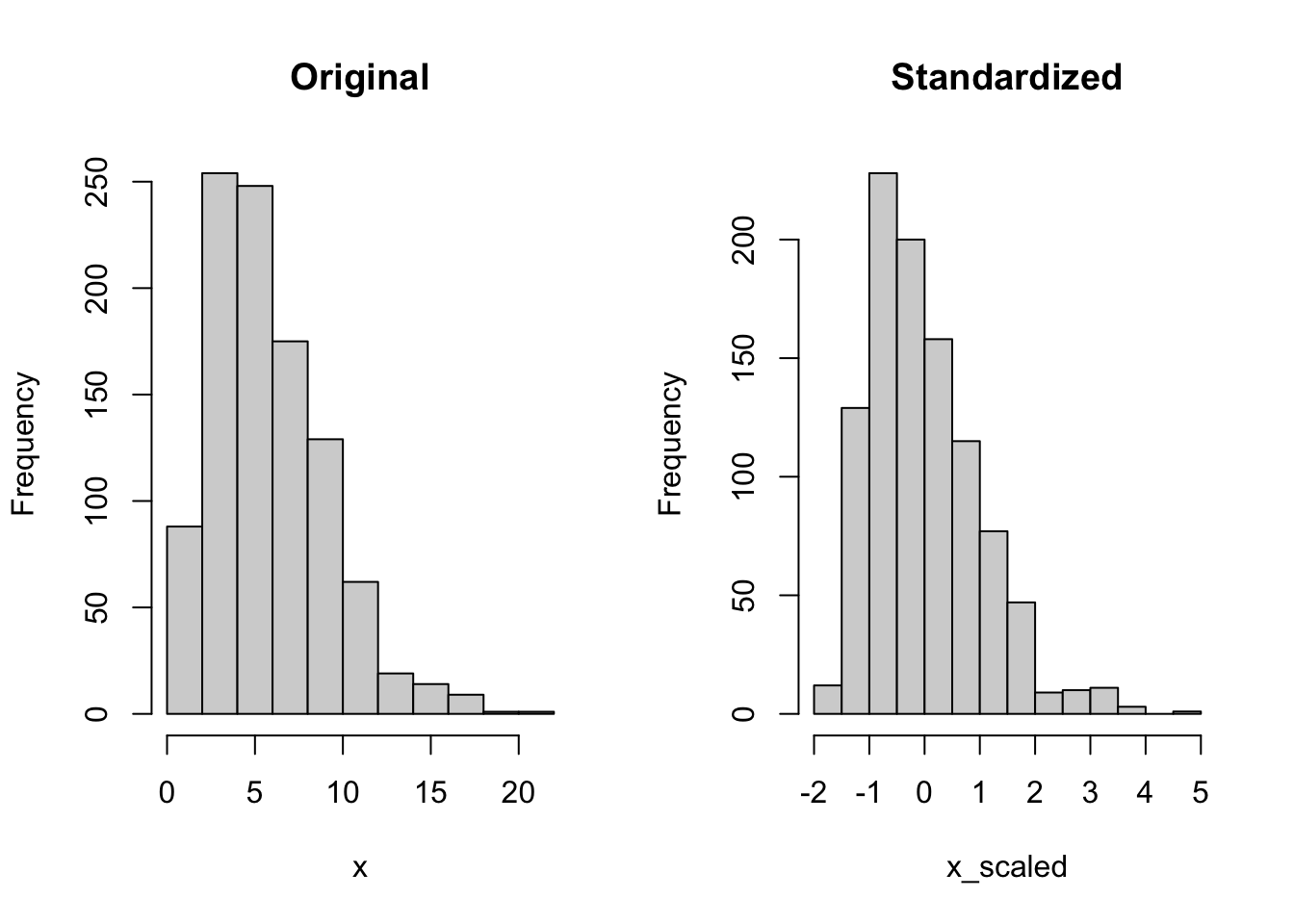
\]Figure 5.1 shows the effect of standardization of 1,000 observations drawn from a Gamma(3,2) distribution. Centering shifts the data to have mean zero and compresses the dispersion of the data to a standard deviation of one. The general shape of the distribution is preserved.
Figure 5.1: Original and standardized data drawn from a Gamma(3,2) distribution.
The mean (center) of the original data is 5.7933 and the standard deviation is 3.29. The scale function centers and scales the data by default, using the mean and the standard deviation. If you call scale without centering, scale(x,center=FALSE), the data will be scaled by the root mean square error, \[
\sqrt{\frac{\sum_{i=1}^n x_i^2}{n-1}}
\] This is not the standard deviation of \(x\). If you wish to scale with the standard deviation without centering, pass the desired value for the scale= parameter:
You will find references in the literature and in software documentation to “scaling the data”. It is often understood as standardization of the data, that is, centering and scaling.
Be also aware of the default behavior of software packages. The prcomp function for principal component analysis in R, for example, centers the data by default but does not scale by default. The loess function in R normalizes the predictor variables, using scaling to a robust estimate of the standard deviation, but only if there is more than one predictor. The glmnet::glmnet function s tandardizes the inputs by default (standardize=TRUE) and reports the results on the original scale of the predictors.
Standardization and Studentization
Technically, standardization in the statistical sense means scaling with the population standard deviation, which is usually unknown. If random variable \(Y\) has mean \(\mu\) and variance \(\sigma^2\), then the standardized form is \[
\frac{Y-\mu}{\sigma}
\]\(\sigma\) is usually unknown and an estimate is calculated based on a sample of \(Y\). When you divide with an estimate of the standard deviation, the process is called studentization. The studentized version of \(Y\) is thus \[
\frac{Y-\mu}{s}
\] where \(s\) is the sample standard deviation. The name stems from the (Student’s) \(t\)-distribution that results if the sample mean in a random sample from a G(\(\mu,\sigma^2\)) distribution is centered and divided by its standard deviation: \[
\frac{\overline{Y}-\mu}{s/\sqrt{n}} \sim t_{n-1}
\]
Range Scaling
This form of standardizing of the data scales the data so it falls between a known lower and upper bound, often 0 and 1. Suppose \(Z\) is a range-scaled version of \(X\) such that \(z_{\text{min}} \le z \le z_{\text{max}}\). \(Z\) can be computed by scaling and shifting a standardized form of \(X\): \[
\begin{align*}
x^* &= \frac{x-\min(x)}{\max(x)-\min(x)} \\
z &= z_{\text{min}} + x^* \times (z_{\text{max}} - z_{\text{min}})
\end{align*}
\tag{5.1}\]
To rescale data in R you can use the rescale function in the scales package or the preProcess function in the caret package. The scales package was developed to support data transformations for visualizations. The caret package is a comprehensive collection of functions that support the training and testing of many statistical and machine learning models.
Alternatively, you can write a function to do that. This is a good opportunity to write a function that performs pretty simple math. However, a lot goes into writing a function that does so in a robust manner. There are many ways in which the simple calculation in Equation 5.1 can go wrong:
x as passed to the function contains missing values
x as passed to the function is not of numeric type
x is a vector of constants (cannot divide by \(\max(x)-\min(x)\))
The caller specifies \(z_{\text{max}}\) and \(z_{\text{min}}\) in the wrong order
The caller specifies \(z_{\text{max}} = z_{\text{min}}\)
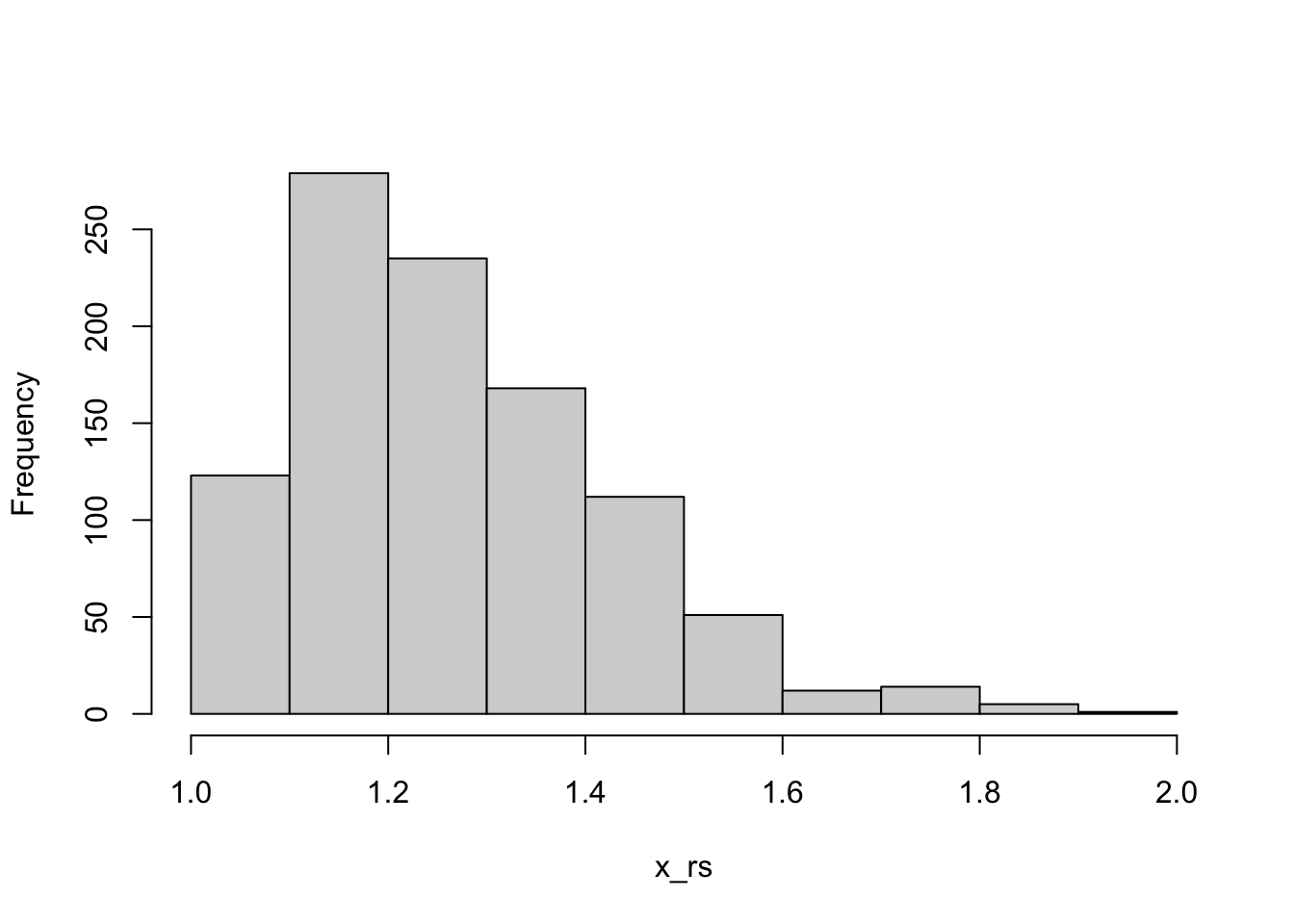
The following code writes a function that handles these cases and scales the Gamma(3,2) data to lie between 1 and 2.
range_scale <-function(x,low=0,hi=1) {if (!is.null(x) &&is.numeric(x)) { minval <-min(x,na.rm=TRUE) maxval <-max(x,na.rm=TRUE)if (maxval-minval <1e-10) {warning("No rescaling done due to small range of data.")return (x) } } else {if (!is.numeric(x)) warning("Cannot rescale non-numeric data.")return (NULL) }if (low > hi) { lowbound <- hi hibound <- lowmessage("Switching hi and low values.") } elseif (low==hi) {return (rep(low,length(x))) } else { lowbound <- low hibound <- hi }if ((lowbound==0) & (hibound==1)) {return ( (x-minval)/(maxval-minval) ) } else {return (lowbound + (x-minval)/(maxval-minval) * (hibound-lowbound)) }}x_rs <-range_scale(x,1,2)hist(x_rs, main="")
Figure 5.2: Sample from Gamma(3,2) distribution scaled to [0,2].
Most lines of code in function range_scale are dedicated to handling bad inputs and boundary cases. That is not unusual in writing robust code.
An advantage of range scaling is that the same range can be applied to training and test data. This makes it easy to process test data prior to applying a model derived from range-scaled data.
To Scale or not to Scale
Some data scientists standardize the data by default. When should you standardize and when should you not? Analytic techniques that depend on measures of distance to express similarity or dissimilarity between observations, or that depend on partitioning variability, typically benefit from standardized input variables.
Examples of the former group are \(K\)-means clustering and hierarchical clustering. Here, the data are grouped into clusters based on their similarity, which is expressed as a function of a distance measure. Without scaling the data, large items tend to be further apart than small items, distorting the analysis toward inputs with large scale. Whether lengths are measured in meters, centimeters, or inches should not affect the analysis. Principal component analysis (PCA) is an example of a method in the second group, apportioning variability to linear combinations of the input variables. Without scaling, inputs that have a large variance can dominate the PCA to the point of not being interpretable or meaningful. Larger things tend to have larger variability compared to small things.
Binary variables, are usually not scaled. This includes variables derived from encoding factor variables, see Section 5.3.1.
Train and Test Data
Any preprocessing steps such as standardization, scaling, normalization, are applied separately to train and test data set. In the case of standardization, for example, it means that you split the data into train and test data sets first, then standardize each separately. The training data set is centered and scaled by the means and sample standard deviations in the training data set. The test data set is centered and scaled by the means and standard deviations in the test data set. Both data sets thus have the same properties of zero mean and standard deviation one.
If we were to standardize first and split into training and test data set second, neither data set would have zero mean and unit standard deviation. Furthermore, information from the training data (the mean and standard deviation) would leak into the test data set.
Using the caret package
The caret package supports standardization and other transformations through the preProcess function. It can operate on all columns of a matrix or data frame, ignoring non-numerical columns. You pass the return object from preProcess to the predict function to generate a data frame from an input data frame.
The following code creates a centered and scaled version of the iris data set.
This does not seem to buy you much over using scale(), but the return object from preProcess is worth checking out with str(iris_sc). It contains a lot of good information about the input data frame or matrix. We’ll use preProcess again below to perform the nonlinear Box-Cox transformation.
The following code applies range scaling to the iris data set, scaling all numeric variables to fall in the [1,5] interval.
Normalization is sometimes (often, actually) described as a transformation of data to normality; the transformed data appears Gaussian distributed. This is not what we consider normalization here. A variable \(z\) that is normalized with respect to the \(L_2\) norm has the property \[
||\textbf{z}|| = \sqrt{\sum_{i=1}^n z_i^2} = 1
\]
A variable \(x\) can be normalized with respect to any norm by dividing each value by the norm of the vector. In the case of \(L_2\), \[
z_i = \frac{x_i}{||\textbf{x}||}
\]
Normalization is a special case of scaling so that the resulting vector has unit length with respect to some norm. Any norm can be used to normalize the data, for example, the \(L_1\) norm \(|\textbf{x}|\). Note that scaling by the standard deviation does not yield a vector with unit length, but a vector with unit standard deviation.
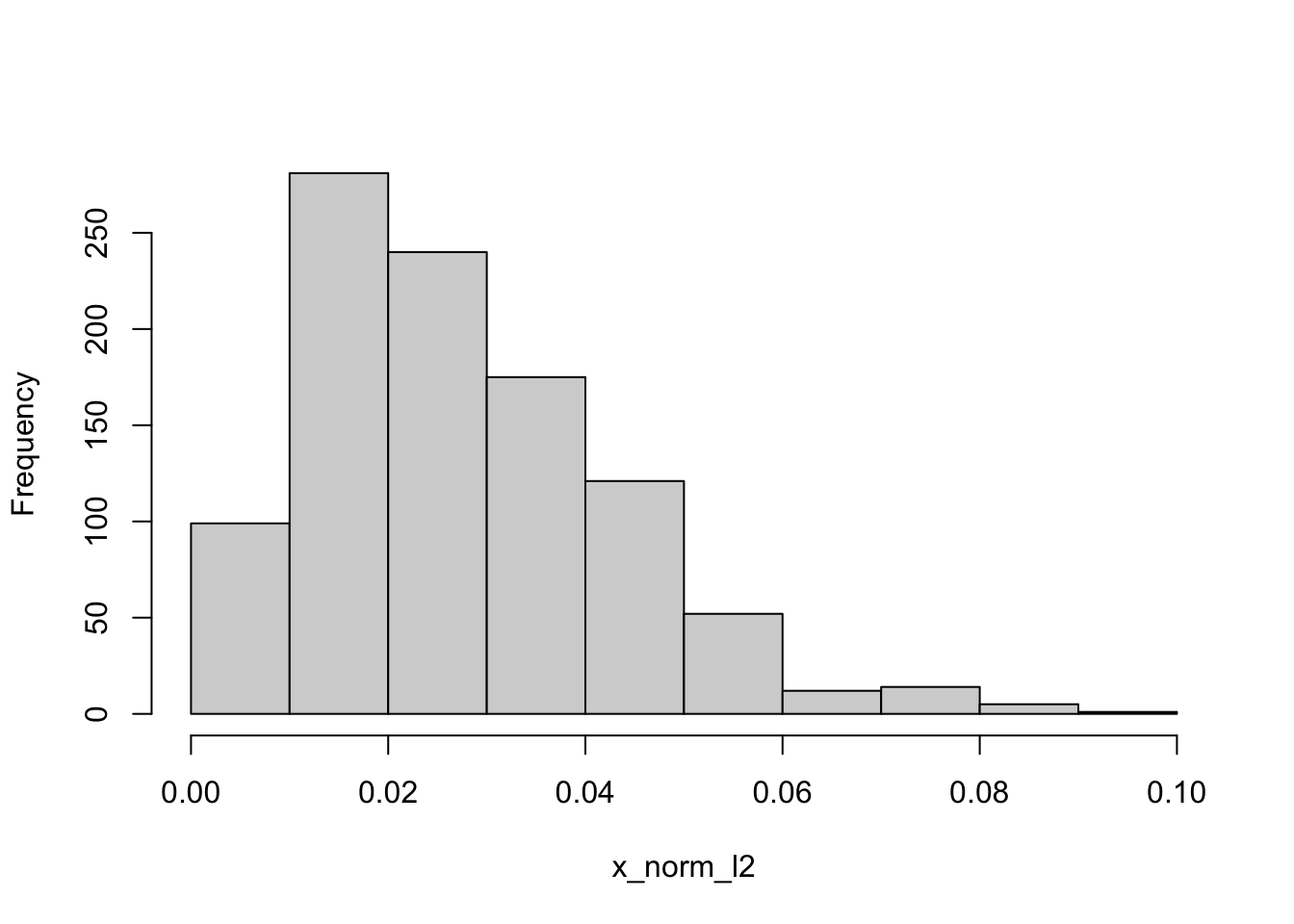
The following code normalizes the Gamma(3,2) sample with respect to \(L_2\).
norm_l2 <-norm(as.matrix(x),type="2")x_norm_l2 <- x/norm_l2# Check, the normalized vector should have L2-norm of 1norm(x_norm_l2,type="2")
[1] 1
hist(x_norm_l2, main="")
Figure 5.3: Normalized data from the Gamma(3,2) distribution.
Normalization of the sample from the Gamma(3,2) distribution maintains the general shape of the distribution and changes its scale (Figure 5.3).
5.3 Encoding
Data processed by algorithms are represented as numbers, integers and real numbers. The information we collect is often not in the form that can be directly processed by a data science algorithm. Treatments in an experiment could be identified with numeric values, “1”, “2”, “3”, etc. We need to somehow tell the algorithm that these are simply identifying labels and should not be treated as numbers for which differences are meaningful. Treatment “2” is simply different from treatment “1”, it is not necessarily twice as much as treatment “1”. Whether the treatments are labeled “1”, “2”, “3”, or “A”, “B”, “C”, the same analysis must result.
Many pieces of information come to us as in the form of character strings, either as structured or as unstructured text. A case of structured text data is when we use strings as labels for things. The treatment labels “A”, “B”, “C” are an example. An example of unstructured text is free-form text such as the quote
The strength of a bureaucracy is measured by its ability to resist change.
An algorithm that predicts the sentiment of the quote must translate these characters into a numerical representation. The process of transforming data from a human-readable form into a machine-readable form is known as encoding in machine learning. The reverse, translating from a machine-readable to a human-readable representation is known as decoding.
In this section we take a somewhat broader view of data encoding.
Definition: Data Encoding and Decoding
Encoding of data is the process of translating information into a numerical format for processing by a statistical or machine learning algorithm.
Decoding is translating information from the numerical format used in analytic processing back into human-readable form.
Encoding is more important to us at this stage. When dealing with natural language processing tasks such as sequence-to-sequence modeling, encoding and decoding are important. An example is the translation of text from one language into another using artificiall neural networks. The input text is encoded into numeric format, processed by a network, and the output of that network is decoded by another network into the target language of translation.
Factor Variables
The first case of encoding information is the processing of factor input variables. Factors are categorical variables representing levels (or classes, or categories, or states). For example, the variable treatment with levels “A”, “B”, and “C” is a three-level factor variable. When this variable is used in a statistical model, it enters the model through its levels, not through its values. That is why some software refers to the process of encoding factor variables as levelization.
To encode factor variables, three decisions affect the representation of the variable and the interpretation of the results:
The order of the levels
The method of encoding
The choice of reference level—if any
The order of the levels is important because it affects the order in which the factor levels enter the model and how the \(\textbf{X}\) matrix is constructed. Consider the following example, which we will use throughout this section, of two factors with 2 and 3 levels, respectively, and a numeric variable \(X\).
Table 5.2: Data with two factors \(A\) and \(B\) with 2 and 3 levels, respectively, and a numeric variable. To distinguish the values of the variables from subsequent encodings, the values are shown in boldface.
Y
A
B
\(X\)
1
1
1
1
2
1
2
0.5
3
1
3
0.25
4
2
1
1
5
2
2
0.5
6
2
3
0.25
One-hot encoding
If we choose one-hot encoding, also called standard encoding or dummy encoding, then the \(k\) levels of each variable are transformed into \(k\) columns of 0/1 values. The value in the \(j\)th column is 1 if the variable is at level \(j\), 0 otherwise. The one-hot encoding for \(A\) and \(B\) in Table 5.2 is shown in Table 5.3.
Table 5.3: One-hot encoding of \(A\) and \(B\).
A
\(A_1\)
\(A_2\)
B
\(B_1\)
\(B_2\)
\(B_3\)
1
1
0
1
1
0
0
1
1
0
2
0
1
0
1
1
0
3
0
0
1
2
0
1
1
1
0
0
2
0
1
2
0
1
0
2
0
1
3
0
0
1
\(A_1\) and \(A_2\) are the first and second columns of the encoded 2-level factor \(A\). So why does the order in which these columns enter a statistical model matter? Suppose our model is a linear model with inputs \(X\), a numeric variable, and \(A\) (\(\textbf{x} = [x, A_1, A_2]\)): \[
f(\textbf{x}) = \beta_0 + \beta_1x + \beta_2 A_1 + \beta_2 A_2
\] For the six observations in Table 5.2, the \(\textbf{X}\) matrix of the model is \[
\textbf{X} = \left [\begin{array}{rrrr}
1 & 1 & 1 & 0 \\
1 & 0.5 & 1 & 0 \\
1 & 0.25 & 1 & 0 \\
1 & 1 & 0 & 1 \\
1 & 0.5 & 0 & 1 \\
1 & 0.25 & 0 & 1 \\
\end{array} \right]
\]
There is a problem, the first column of \(\textbf{X}\) is the sum of the third and forth column. This perfect linear dependency makes the \(\textbf{X}\) matrix singular, the \(\textbf{X}^\prime\textbf{X}\) matrix cannot be inverted, and the ordinary least squares solution cannot be computed.
Error in solve.default(XpX): Lapack routine dgesv: system is exactly singular: U[4,4] = 0
To remedy this problem many software packages implicitly make one of the levels of a one-hot encoded factor a reference level. R takes the first level of a factor as the reference level. The following code creates a data frame from the data in Table 5.2, declares the numeric variable A as a factor and assigns the second level as the reference level.
df <-data.frame(y=c(1,2,3,4,5,6),x=c(1,0.5,0.25,1,0.5,0.25),A=c(1,1,1,2,2,2))df$A <-relevel(as.factor(df$A),ref=2)coef(summary(lm(y ~ x + A, data=df)))
Estimate Std. Error t value Pr(>|t|)
(Intercept) 6.500000 0.2089277 31.11124 7.296355e-05
x -2.571429 0.2857143 -9.00000 2.895812e-03
A1 -3.000000 0.1781742 -16.83746 4.561983e-04
The analysis now succeeds but the coefficients reported seem to be for a model without the reference level, namely \[
f(\textbf{x}) = \beta_0 + \beta_1x + \beta_2 A_1
\]
You can easily verify by specifying this model directly:
df2 <-data.frame(y=c(1,2,3,4,5,6),x=c(1,0.5,0.25,1,0.5,0.25),A1=c(1,1,1,0,0,0))coef(summary(lm(y ~ x + A1, data=df2)))
Estimate Std. Error t value Pr(>|t|)
(Intercept) 6.500000 0.2089277 31.11124 7.296355e-05
x -2.571429 0.2857143 -9.00000 2.895812e-03
A1 -3.000000 0.1781742 -16.83746 4.561983e-04
So where did the information about \(A_2\) end up? To see how this works, consider the model formula for the cases \(A_1 = 0\) and \(A_1 = 1\):
But the value \(A_1=0\) corresponds to \(A_2 = 1\). The simple linear regression \(\beta_0 + \beta_1 x\) is the response for the case where \(A_2 = 1\). The coefficient \(\beta_2\) now measures the difference between the two levels of \(A\), with \(A = 2\) serving as the reference level. The model has two intercepts, one for \(A=1\), and one for \(A=2\), their values are \(6.5 - 3 = 3.5\) and \(6.5\), respectively.
You can also see this from the coefficient estimate in the R output: the sample mean of \(Y\) when \(A = 1\) is \(\overline{y}_{A=1} = 3\) and \(\overline{y}_{A=2} = 6\). Their difference is \(\widehat{\beta}_2 = -3\).
If the first level is chosen as the reference level, this estimate has the opposite sign:
df <-data.frame(y=c(1,2,3,4,5,6),x=c(1,0.5,0.25,1,0.5,0.25),A=c(1,1,1,2,2,2))df$A <-relevel(as.factor(df$A),ref=1)coef(summary(lm(y ~ x + A, data=df)))
Estimate Std. Error t value Pr(>|t|)
(Intercept) 3.500000 0.2089277 16.75220 0.0004631393
x -2.571429 0.2857143 -9.00000 0.0028958122
A2 3.000000 0.1781742 16.83746 0.0004561983
\(A=1\) now serves as the reference level and the coefficient associated with A2 is the difference between the intercept at \(A=2\) and at \(A=1\). The absolute intercepts of the two level remain the same, \(3.5\) for \(A=1\) and \(3.5 + 3 = 6.5\) for \(A=2\).
When a factor has more than two levels, reference levels in one-hot encoding works the same way, the effects of all levels is expressed as the difference of the level with respect to the reference level.
Caution
If a statistical model contains factors and you interpret the coefficient estimates, you must make sure to understand the encoding method–including level ordering and reference levels—otherwise you might draw wrong conclusions about the effects in the model.
When making predictions, the choice of order and reference level does not matter, predictions are invariant, as you can easily verify in the example above.
The issue of a singular cross-product matrix \(\textbf{X}^\prime\textbf{X}\) could have been prevented in the model with \(X\) and \(A\) by dropping the intercept. This model has a full-rank \(\textbf{X}\) matrix \[
\textbf{X} = \left [\begin{array}{rrr}
1 & 1 & 0 \\
0.5 & 1 & 0 \\
0.25 & 1 & 0 \\
1 & 0 & 1 \\
0.5 & 0 & 1 \\
0.25 & 0 & 1 \\
\end{array} \right]
\]
Even without an intercept, the problem resurfaces as soon as another factor enters the model. Suppose we now add \(B\) in one-hot encoding to the model. The \(\textbf{X}\) matrix gets three more columns:
Again, we end up with perfect linear dependencies among the columns. The sum of columns 2–3 equals the sum of columns 4–6. It is thus customary to not drop the intercept when factors are present in the model.
Average effect encoding
An encoding that avoids the singularity issue creates only \(k-1\) columns from the \(k\) levels of the factor and expresses the effect of the levels as differences in the effects from the average effect across all levels. This encoding also relies on the choice of a reference level. Suppose we apply average effect encoding to \(B\) and choose \(B=3\) as the reference level.
Average effect encoding for \(B\) with reference level \(B=3\).
B
\(B_1\)
\(B_2\)
1
\(1\)
\(0\)
2
\(0\)
\(1\)
3
\(-1\)
\(-1\)
1
\(1\)
\(0\)
2
\(0\)
\(1\)
3
\(-1\)
\(-1\)
Baseline encoding
In this encoding, \(k-1\) columns are created for the \(k\) levels of the factor. The first level is taken as the baseline and the effects are expressed in terms of differences between successive levels. Baseline encoding of \(B\) results in the following encoding:
Baseline encoding for \(B\) with reference level \(B=3\).
B
\(B_1\)
\(B_2\)
1
\(0\)
\(0\)
2
\(1\)
\(0\)
3
\(1\)
\(1\)
1
\(0\)
\(0\)
2
\(1\)
\(0\)
3
\(1\)
\(1\)
Example: Baseline and Average Encoding
For our little data set, we compute the baseline and average effect encoding here. Before doing so, let’s fit a model with factor \(B\), and without intercept. The coefficients associated with \(B\) are the raw effects of the three levels of \(B\). The intercept is automatically added in model formula expressions in R. You can remove it with -1 from the model.
The (Intercept) of this model represents the level \(B=1\), X1 is the difference of level \(B=2\) to level \(B=1\) and X2 measures the difference between \(B=3\) and \(B=2\).
If \(B\) is expressed in average effect encoding we obtain the following:
X <-matrix(c(1,0,-1,1,0,-1,0,1,-1,0,1,-1),nrow=6,ncol=2)modB_ave_eff <-lm(df$y ~ X)round(coef(summary(modB_ave_eff)),5)
We see from the initial analysis that the average effect of \(B\) is \(1/3 \times (2.5+3.5+4.5) = 3.5\). The (Intercept) estimate represents this average in the average effect encoding. X1 and X2 on the output represent the differences of \(B=1\) and \(B=2\) from the average.
If we place the \(-1\) row at level \(B=2\), making \(B=2\) the reference level, then X21 and X22 on the following output represent the differences of \(B=1\) and \(B=3\) from the average effect of \(B\):
Why would you encode continuous variables, they are already in numerical form?
Suppose you are modeling a target as a function of time and the measurements are taken in minute intervals. Maybe such a granular resolution is not necessary and you are more interested in seasonal or annual trends. You can convert the time measurements easily into months, seasons, or years, using date-time functions in the software. Should you now treat the converted values as continuous measurements or as categories of a factor?
When working with age variables we sometimes collect them into age groups. Age groups 0-9 years, 10-24 years, and 25-40 years are not evenly spaced and are no longer continuous. Age has been discretized into a factor variable. Other terms used for the process of discretizing continuous variables are binning and quantizing.
The advantage of using factors instead of the continuous values lies in the introduction of nonlinear relationships while maintaining interpretability. If you model age as a continuous variable, then \[
Y = \beta_0 + \beta_1 \text{age} + \cdots + \epsilon
\] implies a linear relationship between age and the target. Binning age into three groups, on the other hand, leads to the model \[
Y = \beta_0 + \beta_1\text{[Age=0-9]} + \beta_2\text{[Age=10-24]} + \beta_3\text{[Age=25-40]} + \cdots + \epsilon
\] This model allows for different effects in the age groups.
To bin continuous numeric variables in R you can use the cut() function in the base package or the ntile function in dplyr. ntile is a rough ranking of the \(n\) observations from smallest to largest, and then bucketing into k groups of roughly equal size. cut takes a numeric vector and also bins it into k groups of equal width. You can supply a a vector of break points to cut which makes it a good choice to bin values by, say, quantiles of the distribution.
The following code bins the variable x into 5 categories using ntile. The result of the operation is an integer that indicates which category (from smallest to largest) the observation belongs to.
cut creates by default character labels that indicate the lower and upper value of the bins. Setting labels=FALSE results in integer values for the categories
The results of ntile and cut are very different: ntile divides the range of X into intervals of equal number of observations, whereas cut divides the range into intervals of equal width.
You can make cut use equal number of observations by supplying a vector of breaks that corresponds to percentiles of the distribution of the data.
The previously discussed preprocessing steps can be applied to any variable, input or target variable.
The purpose of transforming the target variable is to meet distributional assumptions of the analysis. For example, many statistical estimators have particularly nice properties when the data are Gaussian distributed. A common transformation of \(Y\) is thus to morph its distribution so that the transformed \(Y^*\) is closer to Gaussian distributed than \(Y\). Sometimes transformations just aim to create more symmetry or to stabilize the variance across groups of observations. Transformations change the relationship between (transformed) target and the inputs, it is common to transform targets to a scale where effect are linear. We can then model additive effects on the transformed scale instead of complex nonlinear effects on the original scale of the data.
Discretizing
Discretizing a continuous target variable is commonly done to classify the target. If observations are taken with measurement error, we might not be confident in the measured values but we are comfortable classifying an outcome as high or low based on a threshold for \(Y\) and model the transformed data using logistic regression.
Nonlinear Transformations
Nonlinear transformations of a continuous target variable apply functions to modify the distributional properties. A common device to transform right-skewed distributions (long right tail) of positive values is to take logarithms or square roots. If \(Y\) has a log-normal distribution, then the log transformation yields a Gaussian random variable.
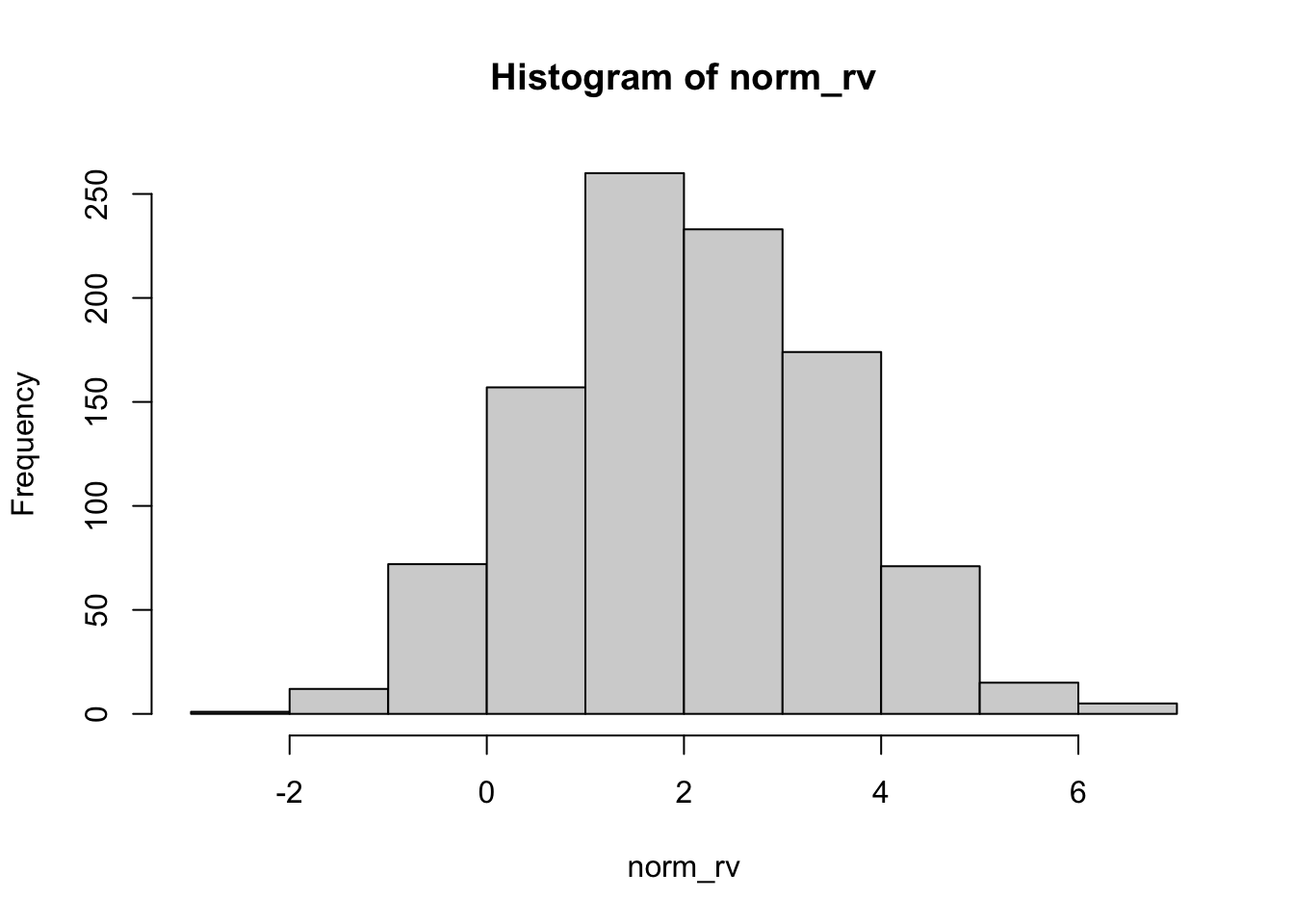
A random variable \(Y\) has a log-normal distribution with parameters \(\alpha\) and \(\beta\) if its p.d.f. is given by \[
p(y) = \frac{1}{y\sqrt{2\pi\beta}}\exp\left\{-\frac{(\log y - \alpha)^2}{2\beta} \right\}, \qquad y > 0
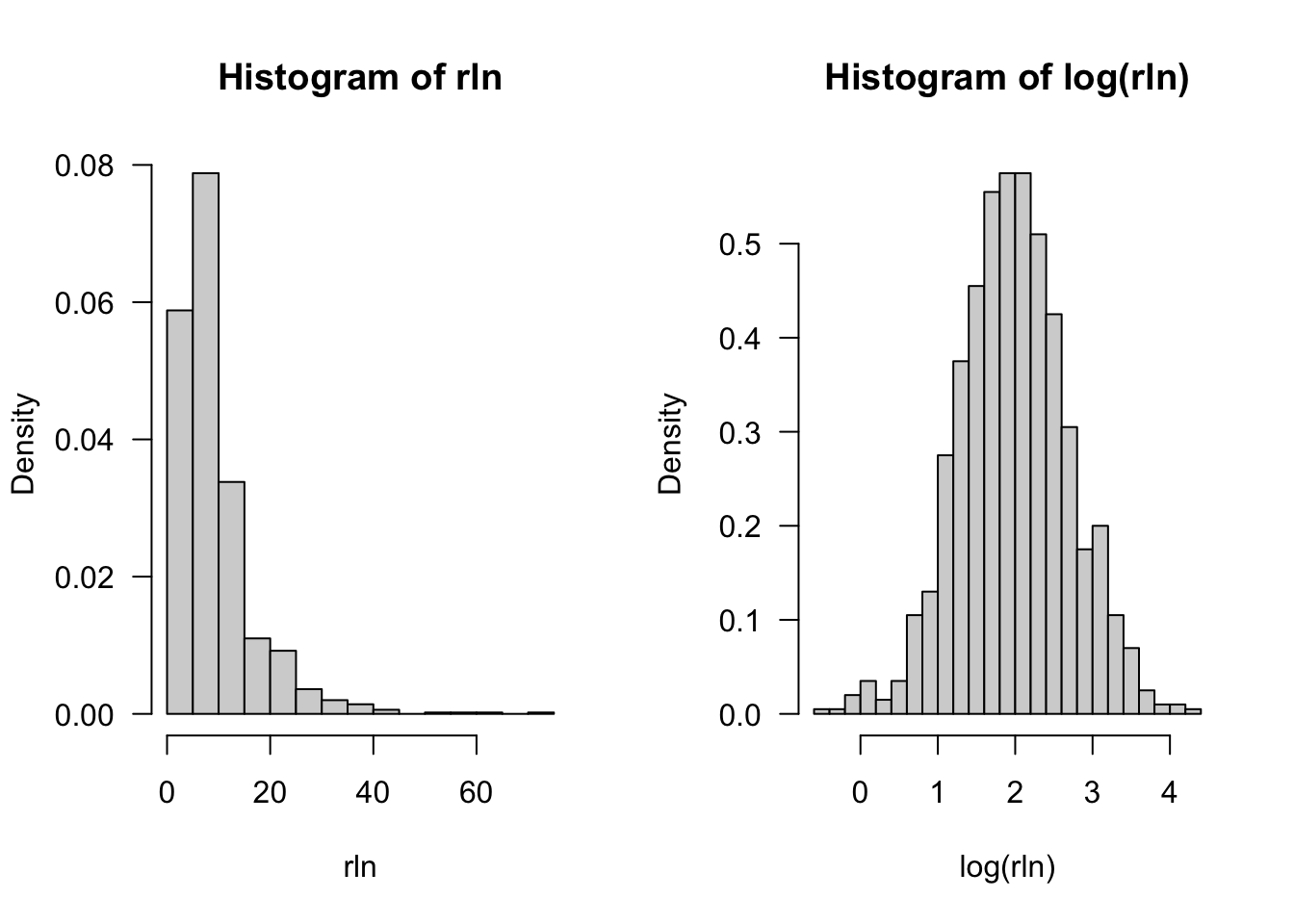
\]\(Y\) has mean \(\mu = \exp\{\alpha + \beta/2\}\) and variance \(\sigma^2 = (e^\beta - 1) \exp\{2\alpha + \beta\}\). If \(Y \sim \text{Lognormal}(\alpha,\beta)\), then \(\log Y\) has a Gaussian distribution with mean \(\alpha\) and variance \(\beta\). We can also construct a log-normal variable from a standard Gaussian: if \(Z \sim G(0,1)\), then \(Y = \exp\{\alpha + \beta Z\}\) has a log-normal distribution. Figure 5.4 shows the histogram of 1,000 random samples from a Lognormal(2,1/2) distribution and the histogram of the log-transformed values.
Figure 5.4: Histograms of 1,000 random samples from \(Y \sim \text{Lognormal}(2,1/2)\) and of \(\log Y\).
Box-Cox family
The Box-Cox family of transformations is a special case of power transformations that was introduced by Box and Cox (1964). The goal of the transformation is to stabilize the variance and to make the data more Gaussian distributed.
Most commonly used is the one-parameter version of the Box-Cox transformation \[
y^{(\lambda)} = \left \{
\begin{array}{ll}
\frac{y^\lambda - 1}{\lambda} & \text{if } \lambda \ne 0 \\
\log y & \text{if } \lambda = 0
\end{array}\right.
\tag{5.2}\]
This transformation applies if \(y > 0\). For the more general case, \(y > -c\), the two-parameter Box-Cox transformation can be used
\(c\) is simply a value by which to shift the distribution so that \(y+c > 0\). The key parameter in the Box-Cox transformation is \(\lambda\).
The term \(-\: 1\) in the numerator and the division by \(\lambda\) for \(\lambda \ne 0\) in Equation 5.2 are linear operations that do not affect the proximity to normality of \(y^{(\lambda)}\). An abbreviated version of Equation 5.2 is
For a given value of \(\lambda\), the transformation is monotonic, mapping large values to large values if \(\lambda > 0\) and large values to small values if \(\lambda < 0\). The transformation thus retains the ordering of observations (Figure 5.5).
Figure 5.5: Box-Cox transformations for various values of \(\lambda\)
How do we find \(\lambda\)? If the assumption is that for some value \(\widehat{\lambda}\) the distribution of \(y^{(\widehat{\lambda})}\) is Gaussian, then \(\lambda\) can be estimated by maximum likelihood assuming a Gaussian distribution—after all, we are looking for the value of \(\lambda\) for which the Gaussian likelihood of the transformed data is highest.
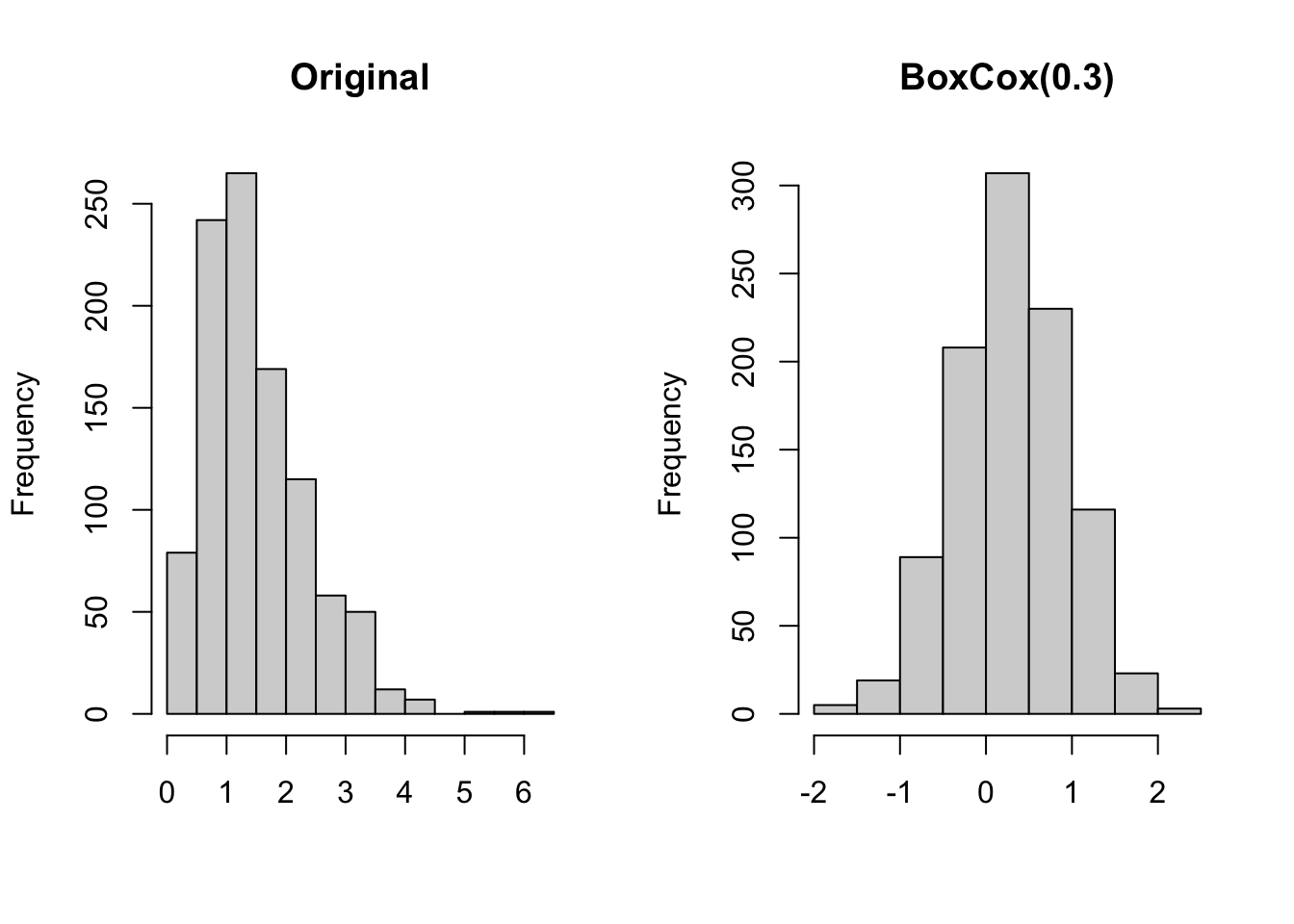
The following code applies the Box-Cox transformation to a random sample from a Gamma(3,2) distribution
Figure 5.6: Original and Box-Cox-transformed data drawn from a Gamma(3,2) distribution.
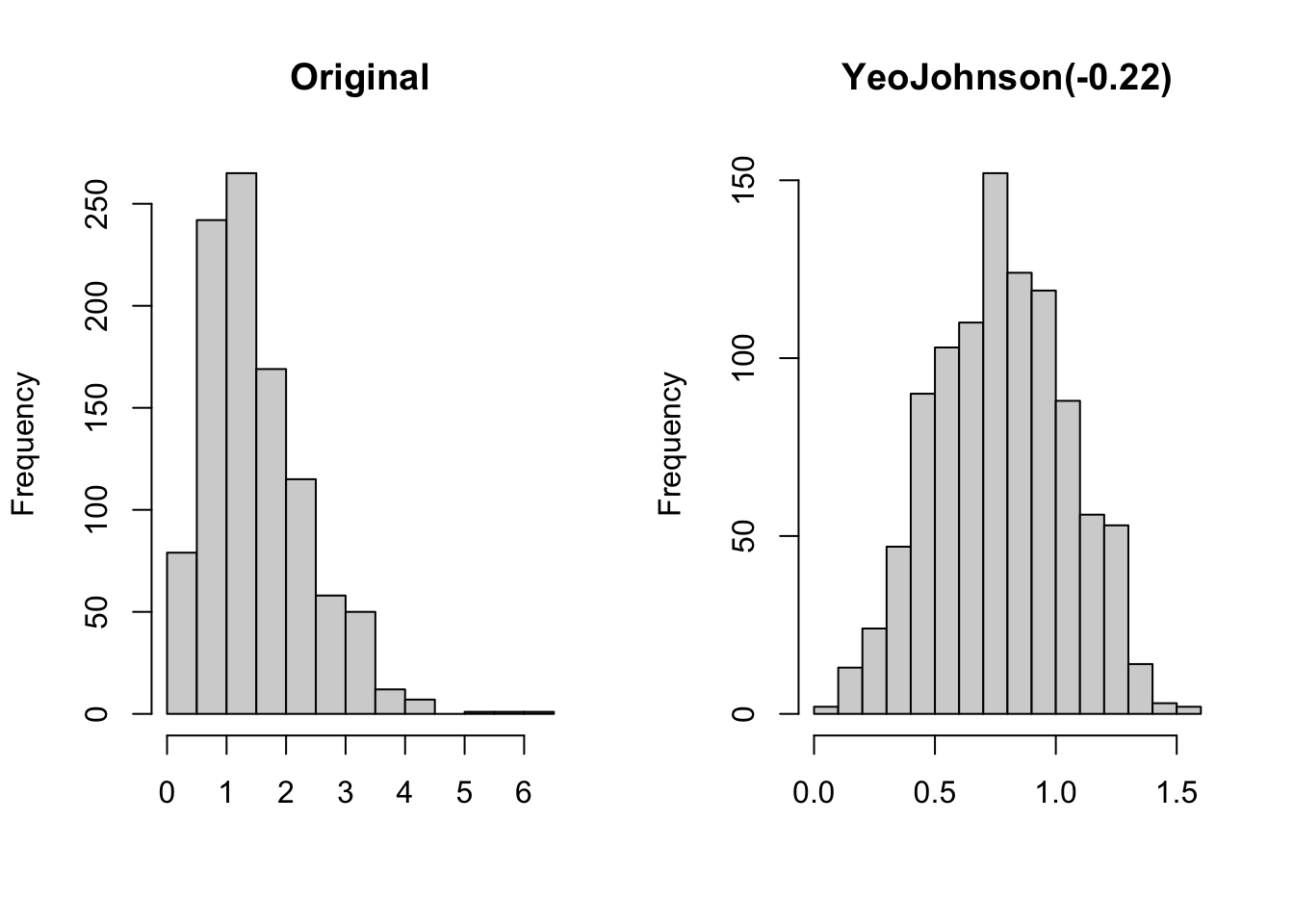
Yeo-Johnson transformation
Yeo and Johnson (2000) proposed an improvement of the Box-Cox transformation to permit negative values. While the two-parameter Box-Cox transformation shown above, which introduces the lower bound parameter \(c\) allows for \(y \ge -c\), this still imposes a lower bound on the value of \(y\). The Yeo-Johnson transformation does not require a lower bound. Their power transformation is \[
y^{(\lambda)} = \left \{
\begin{array}{ll}
\{(y+1)^\lambda-1\}/\lambda & \text{if } y \ge 0; \lambda \ne 0 \\
\log (y+1) & \text{if } y \ge 0; \lambda = 0 \\
-\{(-y +1)^{2-\lambda}-1\}/(2-\lambda) & y < 0; \lambda \ne 2\\
-\log(-y + 1) & y < 0; \lambda = 2
\end{array}\right.
\]
The transformation is constructed to have a continuous second derivative at \(y = 0\), forcing a smooth transition at zero. The parameter \(\lambda\) can be estimated by maximum likelihood, as for the Box-Cox transformation.
Original and Yeo-Johnson-transformed data drawn from a Gamma(3,2) distribution.
Quantile transformation
The Box-Cox transformation does a good job to transform the data closer to a Gaussian distribution in the previous examples. It is not fail safe, however. Data that appear uniform or data with multiple modes do not transform to normality easily with the Box-Cox family.
However, a transformation based on the quantiles of the observed data can achieve this. In fact, you can use quantiles to generate data from any distribution.
If \(Y\) is a random variable with c.d.f. \(F(y) = \Pr(Y \le y)\), then the quantile function \(Q(p)\) is the inverse of the cumulative distribution function; for a given probability \(p\), it returns the value \(y\) for which \(F(y) = p\).
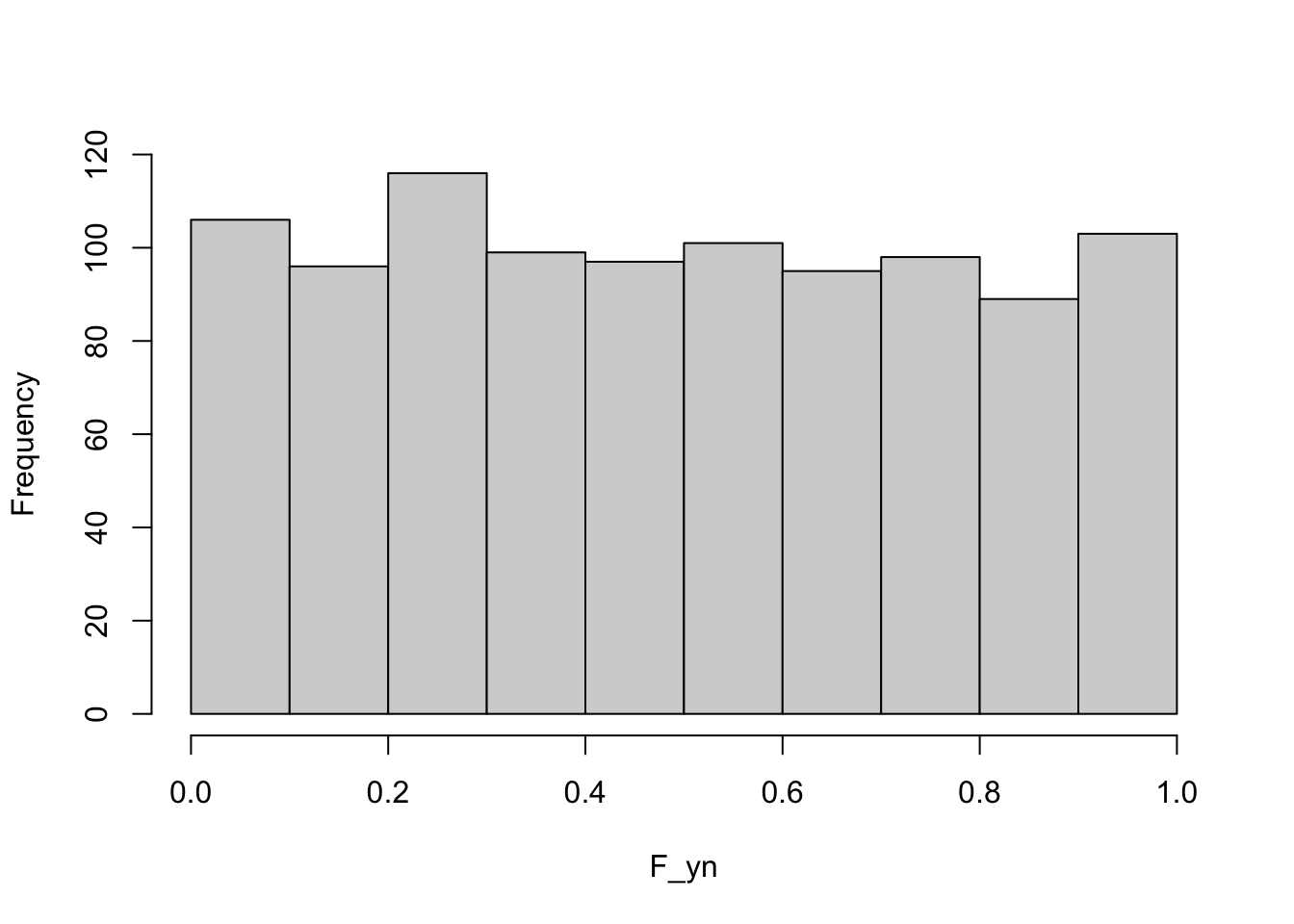
Now here is a possibly surprising result: if \(Y\) has c.d.f. \(F(y)\), then we can think of the c.d.f as a transformation of \(Y\). What would its distribution look like? The following code draws 1,000 samples from a G(\(2,1.5^2\)) distribution and plots the histogram of the c.d.f. values \(F(y)\).
The distribution of \(F(y)\) is uniform on (0,1)—this is true for any distribution, not just the Gaussian.
We can combine this result with the following, possibly also surprising, result: If \(U\) is a uniform random variable, and \(Q(p)\) is the quantile function of \(Y\), then \(Q(u)\) has the same distribution as \(Y\). This is how you can generate random numbers from any distribution if you have a generator of uniform random numbers: plug the uniform random numbers into the quantile function.
These are the key results behind quantile transformation, mapping one distribution to another based on quantiles.
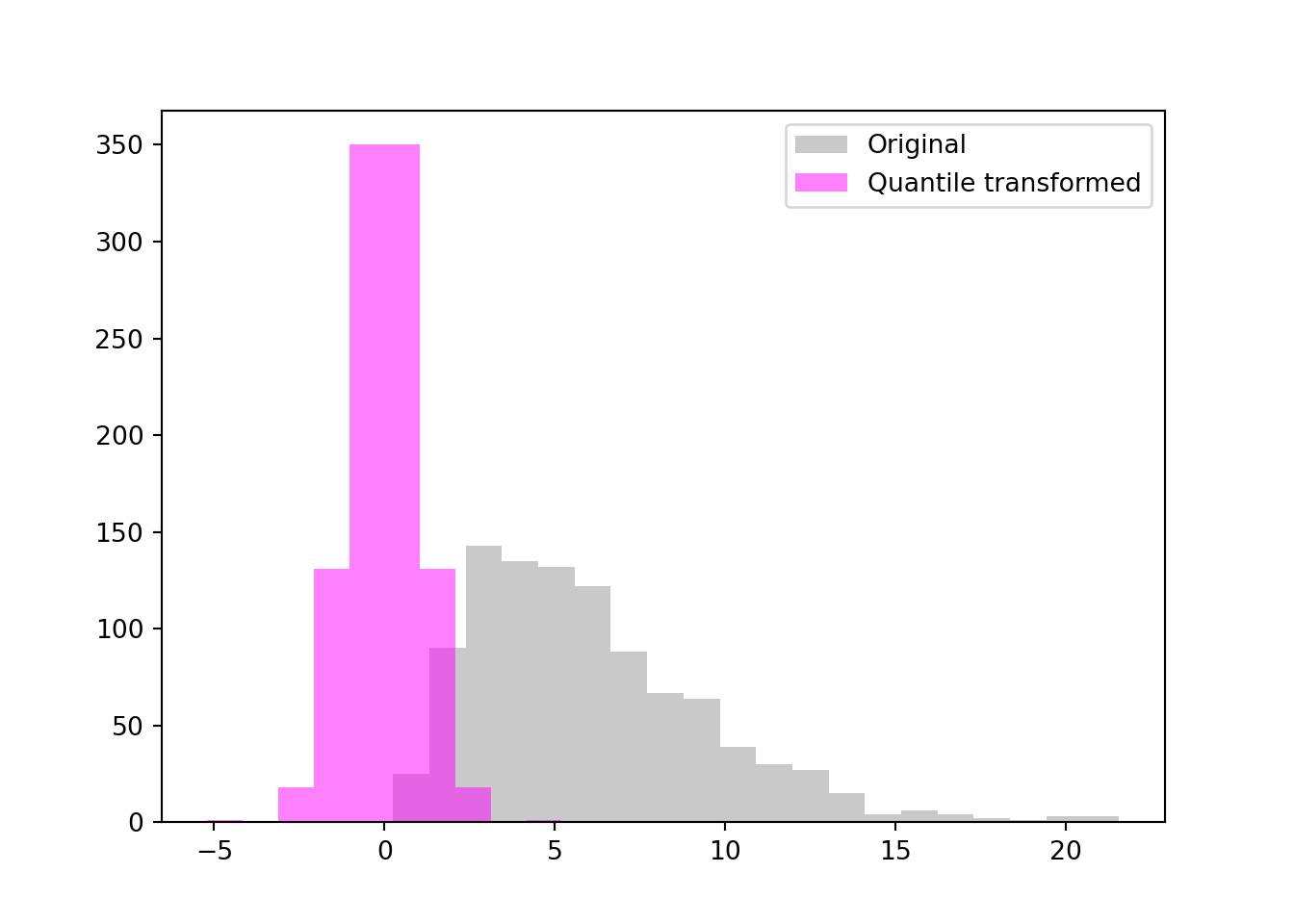
The QuantileTransformer in sklearn.preprocessing can transform data based on quantiles to a uniform (default) or a Gaussian distribution. The results of transformation to normality for the Gamma(3,2) data are shown in Figure 5.7. These are not very different from the results of the Box-Cox transformation. However, the quantile transformation method always works, even in cases where the Box-Cox family of transformation fails to get close to normality.
import numpy as npfrom sklearn import preprocessingimport matplotlib.pyplot as pltnp.random.seed(234)x1 = np.random.gamma(shape=3,scale=2,size=1000)x1 = np.reshape(x1,(-1,1))quantizer = preprocessing.QuantileTransformer( output_distribution='normal')x1_trans = quantizer.fit_transform(x1)plt.figure()plt.hist(x1,bins=20,color='0.7',alpha=0.7,label='Original')plt.hist(x1_trans,color='magenta',alpha=0.5,label='Quantile transformed')plt.legend()plt.show()
Figure 5.7: Quantile transformation to normality for Gamma(3,2) data.
To Transform or not to Transform
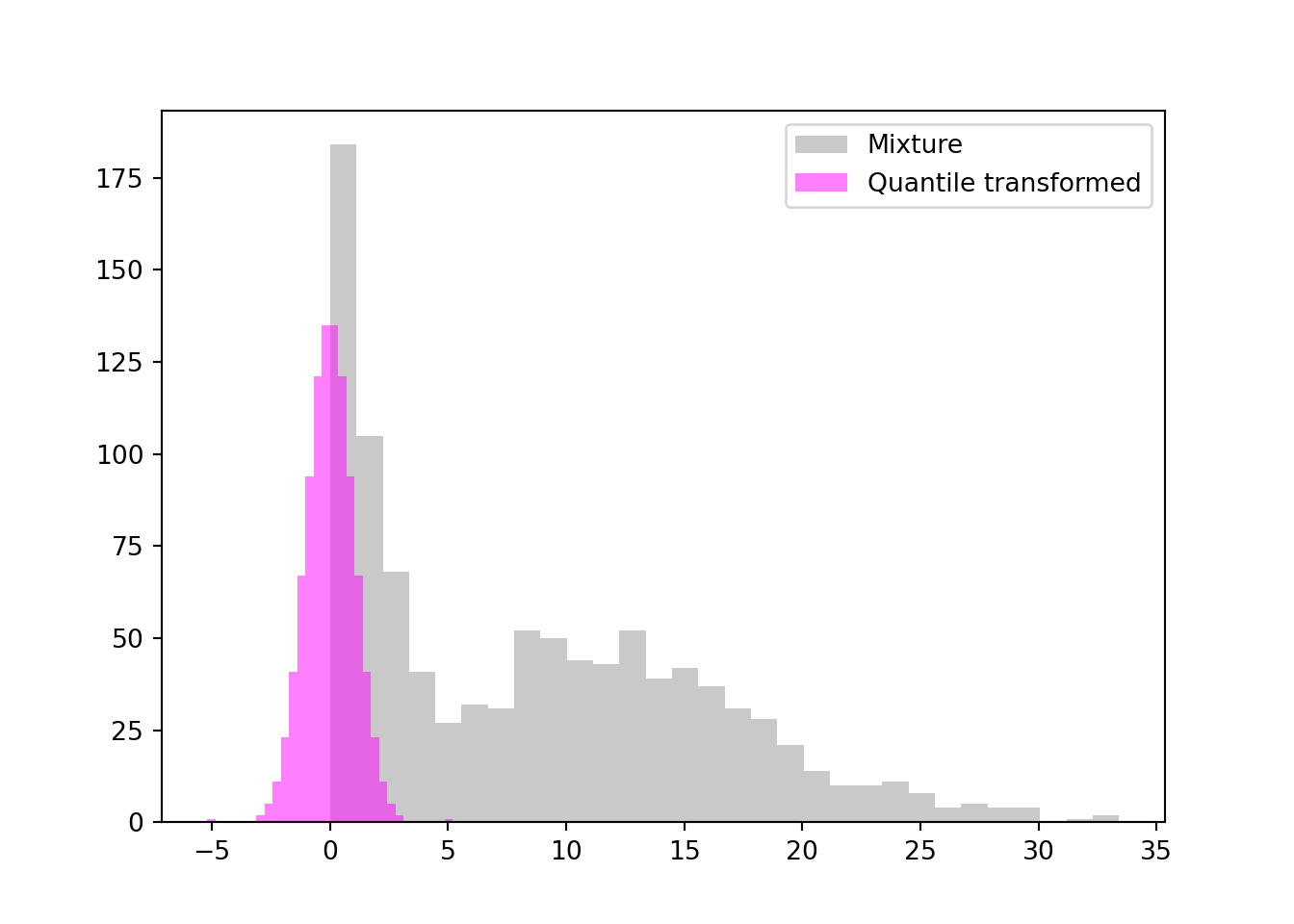
Why do we not always apply a nonlinear transform to a continuous target variable to achieve greater symmetry, stable variance, greater normality? After all, the results of the transformations are impressive. Figure 5.8 shows a quantile transformation to normality for data from a two-component mixture of Gamma densities. The bimodal distribution maps to a standard Gaussian like magic.
Figure 5.8: Quantile transformation to normality for bimodal data from a mixture distribution.
What are you giving up by analyzing the transformed target instead of the original target?
When the goal of data analytics is testing research hypotheses, we usually observe the target variable of interest and formulate hypotheses about its properties. What do these hypotheses mean in terms of the transformed data? This is not always clear, in particular when highly nonlinear transformations such as quantiles are involved.
The parameters of the distribution of \(Y^*\), the transformed target, are not estimating the parameters of the distribution of \(Y\). The mean of \(\log Y\) is not the log of the mean of \(Y\). When the transformation can be inverted, we usually end up with biased estimators. For example, if \(Y\) has a Lognormal(\(\alpha,\beta\)) distribution, then \(\overline{Y}\) is an unbiased estimate of \[
\text{E}[Y] = \exp\{\alpha + \beta/2\}
\]
If we log-transform the data the sample mean of the transformed data \(y^* = \log y\) estimates \[
\text{E}[\overline{Y}^*] = \frac{1}{n}\sum_{i=1}^n \text{E}[\log Y_i]
\] The exponentiation of this estimator is not an unbiased estimator of \(\text{E}[Y]\).
Figure 5.5: Box-Cox transformations for various values of \(\lambda\)Figure 5.8: Quantile transformation to normality for bimodal data from a mixture distribution.
Box, G. E. P., and D. R. Cox. 1964. “An Analysis of Transformations.”Journal of the Royal Statistical Society. Series B (Methodological) 26 (2): 211–52. http://www.jstor.org/stable/2984418.
Yeo, In‐Kwon, and Richard A. Johnson. 2000. “A new family of power transformations to improve normality or symmetry.”Biometrika 87 (4): 954–59. https://doi.org/10.1093/biomet/87.4.954.